Did
-
Compteur de contenus
9 225 -
Inscription
-
Dernière visite
-
Jours gagnés
112
Tout ce qui a été posté par Did
-

topic unique Fibaro FGBS-222 Smart Implant - Détecteur Universel Z-Wave+
Did a répondu à un(e) sujet de Lazer dans Modules Fibaro
Nickel, le FGBS capte jusqu'au fond du jardin. -
topic unique Fibaro FGBS-222 Smart Implant - Détecteur Universel Z-Wave+
Did a répondu à un(e) sujet de Lazer dans Modules Fibaro
Bon, j'ai finalement réussi mon inclusion. -
topic unique Fibaro FGBS-222 Smart Implant - Détecteur Universel Z-Wave+
Did a répondu à un(e) sujet de Lazer dans Modules Fibaro
Bonjour, Je n'arrive pas à insérer mon nouveau Smart Implant, il clignote bien en jaune après les trois appuis mais rien ne se passe coté ajout de module sur la HC2 en v4.600. J'ai aussi fait un redémarrage mais toujours pas d'inclusion. P.S: Ah j'oubliais, j'ai coché les deux premières cases pour faire cet ajout (loin du Home Center et Inclusion réseau élargie) car ce module sera dans le jardin mais mes essais sont faits près de la box. J'ai aussi refait toute cette manip sur ma seconde box (en v4.600) et idem, pas d'inclusion même en décochant NWI. -
Topic unique Fibaro - Fgd-212 - Micromodule Variateur Z-Wave+
Did a répondu à un(e) sujet de Moicphil dans Modules Fibaro
Pas trop de risque d'incendie non plus. -
Topic unique Fibaro - Fgd-212 - Micromodule Variateur Z-Wave+
Did a répondu à un(e) sujet de Moicphil dans Modules Fibaro
Ah oui, dans 20cm, y'a de quoi péter une cloison sans faire de dégât. -
Topic unique Fibaro - Fgd-212 - Micromodule Variateur Z-Wave+
Did a répondu à un(e) sujet de Moicphil dans Modules Fibaro
Si c'est sur une cloison en brique de 5cm (+1cm de plâtre de chaque côté), pas beaucoup de différence avec le placo. -
Oui, tu as raison, on verra bien le 20 janvier.
-
Il ne faut pas compter sur nos médias pour être informé: Je dis ça, je dis rien.
-
Ou le ski de fond.
-
topic unique Fibaro Keyfob FGKF-601 - Télécommande porte-clés Z-Wave+
Did a répondu à un(e) sujet de d@m!Ch94 dans Modules Fibaro
Il est ou cet exemple? Moi, j'ai un peu tout essayé mais pas encore trouvé la solution: if StartSource['keyId'] == 5 then -- Leds Terrasse off fibaro:call(334, "turnOff"); end if StartSource['keyId'] == 53 then -- Leds Terrasse Rainbow fibaro:call(334, "turnOn"); fibaro:call(334, "startProgram", 222); end Je ne suis pas certain de la commande d"allumage + démarrage du programme 222 (TurnOn seul n'allume pas non plus en blanc). Et comment lui dire de surveiller le double appui du bouton 5 (le moins), c'est bien 53, non? J'ai pourtant bien "Transfert OK" qui s'affiche brièvement après un appui (pour deux appuis, je ne suis pas sûr). -
Ce sont justement les propos de l'INPI suite au dépôt de son brevet.
-
topic unique Fibaro Keyfob FGKF-601 - Télécommande porte-clés Z-Wave+
Did a répondu à un(e) sujet de d@m!Ch94 dans Modules Fibaro
J'ai trouvé, une accolade à déplacer après les conditions et les Id dans l'entête. GEA.add({{"CentralSceneEvent", id["Keyfob_terrasse"], 4, "Pressed" },{"Value",id["Terrasse_bois"],1}}, -1, "", {"turnOff",id["Terrasse_bois"]}) GEA.add({{"CentralSceneEvent", id["Keyfob_terrasse"], 4, "Pressed" },{"Value",id["Terrasse_bois"],0}}, -1, "", {"turnOn",id["Terrasse_bois"]}) Je trouve qu'il y a un peu de latence par rapport à la scène. -
topic unique Fibaro Keyfob FGKF-601 - Télécommande porte-clés Z-Wave+
Did a répondu à un(e) sujet de d@m!Ch94 dans Modules Fibaro
Non , ça ne marche pas, juste la touche avec le double appui. Il doit y avoir un problème d'accolades. -
topic unique Fibaro Keyfob FGKF-601 - Télécommande porte-clés Z-Wave+
Did a répondu à un(e) sujet de d@m!Ch94 dans Modules Fibaro
Du coup, pour les cinq touches où je vais faire On/Off avec un simple appui, il faut que je rentre les Id dans l'entête? -
topic unique Fibaro Keyfob FGKF-601 - Télécommande porte-clés Z-Wave+
Did a répondu à un(e) sujet de d@m!Ch94 dans Modules Fibaro
O.K, merci j'essaie comme ça tout sera basculé sur GEA. -
topic unique Fibaro Keyfob FGKF-601 - Télécommande porte-clés Z-Wave+
Did a répondu à un(e) sujet de d@m!Ch94 dans Modules Fibaro
Avec value et inverse? -
topic unique Fibaro Keyfob FGKF-601 - Télécommande porte-clés Z-Wave+
Did a répondu à un(e) sujet de d@m!Ch94 dans Modules Fibaro
Ça se présente comment en ligne Lua? Ça sortira dans le debug? Je viens d'essayer les lignes de @Lazer dans le topic Remotec ZRC-90 et en commandant un FGS, le double appui fonctionne GEA.add({"CentralSceneEvent", id["Keyfob_terrasse"], 5, "Pressed" }, -1, "", {{"turnOff", id["Prises_commandees_Salle_a_manger"]}}) GEA.add({"CentralSceneEvent", id["Keyfob_terrasse"], 5, "Pressed2"}, -1, "", {{"turnOn", id["Prises_commandees_Salle_a_manger"]}}) J'ai remis mon FGRGB, et ça marche. Par contre, si je veux pour d'autres touches couplées à un FGS, faire un appui pour allumer et un appui pour éteindre (avec la même touche)? -
topic unique Fibaro Keyfob FGKF-601 - Télécommande porte-clés Z-Wave+
Did a répondu à un(e) sujet de d@m!Ch94 dans Modules Fibaro
Bonjour, Je suis toujours coincé avec l'utilisation d'un double appui, j'ai remplacé le bandeau led par l'Id d'un FGS et je n'ai que l'extinction (un appui) qui fonctionne, j'ai ajouté "Key Pressed 2 times" dans le paramètre 25 (bouton moins) mais toujours rien. if StartSource['keyId'] == 5 then fibaro:call(25, "turnOff"); end if StartSource['keyId'] == 53 then fibaro:call(25, "turnOn"); end 53 est bien le KeyId pour le double appui? -
Voilà la solution:
-
Impossible de télécharger des fichiers sur ce forum
Did a répondu à un(e) sujet de icossane dans Nouveau ? Présentez-vous
Même réponse ---> Lien magique (mais pas dans une présentation de quelqu'un d'autre). -
Home Center 3 - Prix de folies chez nos amis Allemands
Did a répondu à un(e) sujet de mprinfo dans Sites internet
Le fil rouge sur le bouton rouge. Sauf que j'étais pas tout à fait colonel... même pas première classe. Je n'ai gardé que les couronnes mais de fil. -
Home Center 3 - Prix de folies chez nos amis Allemands
Did a répondu à un(e) sujet de mprinfo dans Sites internet
Tu ne sais plus compter? 87/10 -
Home Center 3 - Prix de folies chez nos amis Allemands
Did a répondu à un(e) sujet de mprinfo dans Sites internet
Je n'y suis allé qu'une fois à Kehl, c'est pas tout jeune, c'était pour l'incorporation (sous les drapeaux). -
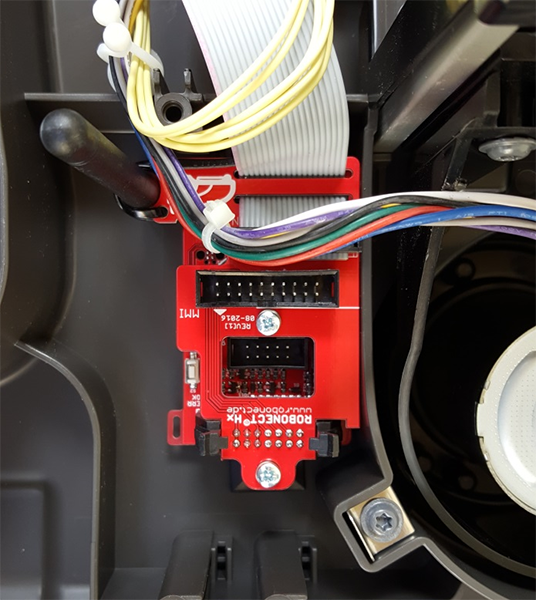
La carte Robonect est installée et tout fonctionne, on a même accès a des paramètres supplémentaires pas visibles sur l'écran de la bécane. Grace à l'aide d'un VD repêché sur le net, j'ai commencé a arranger à ma sauce mais je rame toujours avec le Lua. https://www.domotique-fibaro.fr/topic/14714-vd-robonect-pour-hc2/ Et aussi la carte est en promo pendant le Black Friday: https://www.robonect-shop.de/shop/robonect-hx/
-
Bonjour tout le monde, J'ai installé mon module Robonect sur l'Automower, tout fonctionne parfaitement sans les remontées vers la HC2, mais après pas mal de recherche, je suis enfin tombé sur un VD pour HC2 concernant la carte Robonect (sur leur site d'ailleurs, je ne l'avais pas vu la première fois). https://robonect.de/viewtopic.php?f=12&t=287 Le problème est qu'il est en allemand, j'ai commencé à traduire quelques étiquettes, entrer mes identifiants et créer les trois variables requises, il fonctionne mais quelques petits soucis subsistent, même en rentrant les numéros des icônes, celle du VD reste invariablement sur la OFFline (même quand elle tond). Je n'ai pas non plus encore testé les boutons de mode, juste le "Statut". Voici la mainloop (je vous livre celle du VD d'origine pour ne pas laisser mes identifiants): fibaro:debug('Starte PING') local IP = '192.168.xx.xx' local PORT = 80 local versuche = 3 local iconOFFLINE = "1009" -- ANPASSEN; Gerät ist offline local iconONLINE = "1001" -- ANPASSEN; Gerät ist online local iconCHECK = "1003" -- ANPASSEN; Gerät wird angepingt local function _ping(retry) fibaro:call(fibaro:getSelfId(), "setProperty", "currentIcon", iconCHECK) retry = retry or 0 local tcpSocket = Net.FTcpSocket(IP, PORT) tcpSocket:setReadTimeout(250) fibaro:debug('Suche..., versuche #' .. retry .. ' bitte warten...') fibaro:sleep(250) local bytes, errorCode = tcpSocket:write('ping') if errorCode == 0 then return true else if retry < versuche then fibaro:debug('Nicht gefunden, erneut versuchen, bitte warten...') fibaro:sleep(1000); return _ping(retry + 1) end return false end end local f, result = pcall(_ping) if (f) then if (result == true) and (fibaro:getGlobalValue("Variable_AM_Timer") == "Aktiv" ) then fibaro:debug(IP.. ':' .. PORT .. ' wurde gefunden, der Timer Status des Automower ist Aktiv') fibaro:debug("Status wird abgefragt"); fibaro:call(175, "pressButton", "6"); fibaro:debug("Status wurde abgefragt, warte für 2 Minuten"); fibaro:call(175, "setProperty", "currentIcon", iconONLINE); fibaro:sleep(120000) elseif (result == true) and (fibaro:getGlobalValue("Variable_AM_Timer") == "Standby" ) then fibaro:debug(IP.. ':' .. PORT .. ' wurde gefunden, der Timer Status des Automower ist Standby') fibaro:debug("Status wird abgefragt"); fibaro:call(175, "pressButton", "6"); fibaro:debug("Status wurde abgefragt, warte für 30 Minuten"); fibaro:call(175, "setProperty", "currentIcon", iconONLINE); fibaro:sleep(1800000) elseif (result == true) and (fibaro:getGlobalValue("Variable_AM_Timer") == "Deaktiviert" ) then fibaro:debug(IP.. ':' .. PORT .. ' wurde gefunden, der Timer Status des Automower ist Deaktiviert') fibaro:debug("Status wird abgefragt"); fibaro:call(175, "pressButton", "6"); fibaro:debug("Status wurde abgefragt, warte für 30 Minuten"); fibaro:call(175, "setProperty", "currentIcon", iconONLINE); fibaro:sleep(1800000) elseif (result == true) and (fibaro:getGlobalValue("Variable_AM_Timer") == "Manuell" ) then fibaro:debug(IP.. ':' .. PORT .. ' wurde gefunden, der Timer Status des Automower ist Manuell') fibaro:debug("Status wird abgefragt"); fibaro:call(175, "pressButton", "6"); fibaro:debug("Status wurde abgefragt, warte für 10 Minuten"); fibaro:call(175, "setProperty", "currentIcon", iconONLINE); fibaro:sleep(600000) else fibaro:debug(IP.. ':' .. PORT .. ' wurde nicht gefunden.') fibaro:call(fibaro:getSelfId(), "setProperty", "currentIcon", iconOFFLINE) fibaro:call(175, "setProperty", "currentIcon", iconOFFLINE); fibaro:debug("Status des Automower wird aufgrund mangelnder Erreichbarkeit nicht abgefragt") fibaro:debug("Status wurde nicht abgefragt, warte für 10 Minuten)"); fibaro:sleep(600000) end else fibaro:debug('Error: ' .. f) end Et le bouton n°6 "Status" (les autres n'ont que quelques lignes): -- Setze Verbindungsdaten -- Benutzername Passwort fuer MOWER mowerUser = "MOWER" mowerPW = "PWD" -- hole ip adresse aus virtuellem modul selfId = fibaro:getSelfId() mowerIP = fibaro:get(selfId, "IPAddress") mowerPort = fibaro:get(selfId, "TCPPort") -- setze variable MOWER aus IP und Logindaten MOWER = Net.FHttp(mowerIP) MOWER:setBasicAuthentication(mowerUser, mowerPW) -- ------------------------------------------------- -- ------------------------------------------------- -- geting info about specific device response = MOWER:GET("/json?cmd=status") -- decoding json string to table extractedjson = json.decode(response) -- "status/battery": "Battery Status" -- "status/duration": "Mode Duration" -- "status/hours": "Hours" -- "status/mode": "Mode" -- "status/status": "Status" -- "timer/status": "Timer Status" battery = extractedjson.status.battery duration = extractedjson.status.duration hours = extractedjson.status.hours AM_Status = extractedjson.status.status AM_Mode = extractedjson.status.mode AM_Timer = extractedjson.timer.status fibaro:debug(battery.."%") fibaro:debug(duration.."s") fibaro:debug(hours.."h") fibaro:debug(AM_Status) fibaro:debug(AM_Mode) fibaro:debug(AM_Timer) fibaro:call(selfId, "setProperty", "ui.LabelBatterystatus.value",(battery).." %"); fibaro:call(selfId, "setProperty", "ui.LabelModeDuration.value",(duration).." s"); fibaro:call(selfId, "setProperty", "ui.LabelHours.value",(hours).."h"); fibaro:call(selfId, "setProperty", "ui.LabelMode.value",(AM_Mode)); fibaro:call(selfId, "setProperty", "ui.LabelStatus.value",(AM_Status)); fibaro:call(selfId, "setProperty", "ui.LabelTimer.value",(AM_Timer)); fibaro:debug("Status Auswertung gestartet") if (AM_Status == 0) then fibaro:call(selfId, "setProperty", "ui.LabelStatus.value"," Status wird ermittelt"); fibaro:log("Status: Status wird ermittelt") fibaro:debug("Status wird ermittelt") elseif (AM_Status == 1) then fibaro:call(selfId, "setProperty", "ui.LabelStatus.value"," Automower parkt"); fibaro:log("Status: Automower parkt") fibaro:debug("Automower parkt") elseif (AM_Status == 2) then fibaro:call(selfId, "setProperty", "ui.LabelStatus.value"," Automower mäht"); fibaro:log("Status: Automower mäht") fibaro:debug("Automower mäht") elseif (AM_Status == 3) then fibaro:call(selfId, "setProperty", "ui.LabelStatus.value"," Automower sucht die Ladestation"); fibaro:log("Status: Automower sucht die Ladestation") fibaro:debug("Automower sucht die Ladestation") elseif (AM_Status == 4) then fibaro:call(selfId, "setProperty", "ui.LabelStatus.value"," Automower lädt"); fibaro:log("Status: Automower lädt") fibaro:debug("Automower lädt") elseif (AM_Status == 5) then fibaro:call(selfId, "setProperty", "ui.LabelStatus.value"," Automower sucht (wartet auf das Umsetzen im manuellen Modus)"); fibaro:log("Status: Automower sucht (wartet auf das Umsetzen im manuellen Modus)") fibaro:debug("Automower sucht (wartet auf das Umsetzen im manuellen Modus)") elseif (AM_Status == 7) then fibaro:call(selfId, "setProperty", "ui.LabelStatus.value"," Fehlerstatus"); fibaro:log("Status: Fehlerstatus") fibaro:debug("Fehlerstatus") elseif (AM_Status == 8) then fibaro:call(selfId, "setProperty", "ui.LabelStatus.value"," Schleifensignal verloren"); fibaro:log("Status: Automower Schleifensignal verloren") fibaro:debug("Automower Schleifensignal verloren") elseif (AM_Status == 16) then fibaro:call(selfId, "setProperty", "ui.LabelStatus.value"," Automower abgeschaltet"); fibaro:log("Status: Automower abgeschaltet") fibaro:debug("Automower abgeschaltet") elseif (AM_Status == 17) then fibaro:call(selfId, "setProperty", "ui.LabelStatus.value"," Automower schläft"); fibaro:log("Status: Automower schläft") fibaro:debug("Automower schläft") else fibaro:call(selfId, "setProperty", "ui.LabelState.value"," Error"); fibaro:log("Status: Ladefehler") fibaro:debug("Ladefehler") end fibaro:setGlobal("AM_Status", AM_Status); fibaro:sleep(100); fibaro:debug("Mode Auswertung gestartet") if (AM_Mode == 0) then fibaro:call(selfId, "setProperty", "ui.LabelMode.value"," Auto"); fibaro:log("Mode: Auto") fibaro:debug("Auto") elseif (AM_Mode == 1) then fibaro:call(selfId, "setProperty", "ui.LabelMode.value"," Manuell"); fibaro:log("Mode: Manuell") fibaro:debug("Manuell") elseif (AM_Mode == 2) then fibaro:call(selfId, "setProperty", "ui.LabelMode.value"," Home"); fibaro:log("Mode: Home") fibaro:debug("Home") elseif (AM_Mode == 3) then fibaro:call(selfId, "setProperty", "ui.LabelMode.value"," Demo"); fibaro:log("Mode: Demo") fibaro:debug("Demo") else fibaro:call(selfId, "setProperty", "ui.LabelMode.value"," Error"); fibaro:log("Mode: Fehler") fibaro:debug("Fehler") end fibaro:setGlobal("AM_Mode", AM_Mode); fibaro:sleep(100); fibaro:debug("Timer Auswertung gestartet") if (AM_Timer == 0) then fibaro:call(selfId, "setProperty", "ui.LabelTimer.value"," Deaktiviert"); fibaro:log("Timer: Deaktiviert") fibaro:debug("Deaktiviert") elseif (AM_Timer == 1) then fibaro:call(selfId, "setProperty", "ui.LabelTimer.value"," Auto"); fibaro:log("Timer: Auto") fibaro:debug("Auto") elseif (AM_Timer == 2) then fibaro:call(selfId, "setProperty", "ui.LabelTimer.value"," Standby"); fibaro:log("Timer: Standby") fibaro:debug("Standby") else fibaro:call(selfId, "setProperty", "ui.LabelTimer.value"," Error"); fibaro:log("Timer: Fehler") fibaro:debug("Fehler") end fibaro:setGlobal("AM_Timer", AM_Timer); -- Setze Icon fibaro:debug('Starte PING') local IP = '192.168.xx.xx' local PORT = 80 local versuche = 3 local iconOFFLINE = "1002" -- ANPASSEN; Gerät ist offline local iconONLINE = "1001" -- ANPASSEN; Gerät ist online local iconCHECK = "1003" -- ANPASSEN; Gerät wird angepingt local function _ping(retry) fibaro:call(fibaro:getSelfId(), "setProperty", "currentIcon", iconCHECK) retry = retry or 0 local tcpSocket = Net.FTcpSocket(IP, PORT) tcpSocket:setReadTimeout(250) fibaro:debug('Suche..., versuche #' .. retry .. ' bitte warten...') fibaro:sleep(250) local bytes, errorCode = tcpSocket:write('ping') if errorCode == 0 then return true else if retry < versuche then fibaro:debug('Nicht gefunden, erneut versuchen, bitte warten...') fibaro:sleep(1000); return _ping(retry + 1) end return false end end local f, result = pcall(_ping) if (f) then if (result == true) and (fibaro:getGlobalValue("Variable_AM_Timer") == "Aktiv" ) then fibaro:debug(IP.. ':' .. PORT .. ' wurde gefunden, der Timer Status des Automower ist Aktiv') fibaro:debug("Status wird abgefragt"); fibaro:call(175, "setProperty", "currentIcon", iconONLINE); elseif (result == true) and (fibaro:getGlobalValue("Variable_AM_Timer") == "Standby" ) then fibaro:debug(IP.. ':' .. PORT .. ' wurde gefunden, der Timer Status des Automower ist Standby') fibaro:debug("Status wird abgefragt"); fibaro:call(175, "setProperty", "currentIcon", iconONLINE); elseif (result == true) and (fibaro:getGlobalValue("Variable_AM_Timer") == "Deaktiviert" ) then fibaro:debug(IP.. ':' .. PORT .. ' wurde gefunden, der Timer Status des Automower ist Deaktiviert') fibaro:debug("Status wird abgefragt"); fibaro:call(175, "setProperty", "currentIcon", iconONLINE); elseif (result == true) and (fibaro:getGlobalValue("Variable_AM_Timer") == "Manuell" ) then fibaro:debug(IP.. ':' .. PORT .. ' wurde gefunden, der Timer Status des Automower ist Manuell') fibaro:debug("Status wird abgefragt"); fibaro:call(175, "setProperty", "currentIcon", iconONLINE); else fibaro:debug(IP.. ':' .. PORT .. ' wurde nicht gefunden.') fibaro:call(fibaro:getSelfId(), "setProperty", "currentIcon", iconOFFLINE) fibaro:call(175, "setProperty", "currentIcon", iconOFFLINE); fibaro:debug("Status des Automower wird aufgrund mangelnder Erreichbarkeit nicht abgefragt") end else fibaro:debug('Error: ' .. f) end J'ai aussi bien remplacé chaque numéro 175 par l'ID de mon VD. J'ai remarqué des différences sur quelques lignes, certaines ont des apostrophes au lieu des guillemets, est-ce normal? Comment fait-on pour ajouter d'autres infos du genre température, humidité, usure des lames ou même la position GPS qui doivent apparaître dans la trame json? J'ai bien essayé d'ajouter une nouvelle étiquette et dupliquer des lignes du genre fibaro:call(selfId, "setProperty", "ui.LabelHours.value" en remplaçant par blades par exemple (pour l'info des lames). J'aimerais aussi ajouter une icône quand la tondeuse est en charge et une autre quand elle est en défaut. Je cherche toujours un doc sur l'API du Robonect. Merci pour votre aide. VD_Automower_2019 Robonect.vfib P.S: Je vous rajoute aussi une trame du json: http://IP_mower/xml?cmd=status&blades&quality%7BAuthorization=Basic <robonect> <name>**********</name> <id>******</id> <status> <status>17</status> <distance>0</distance> <stopped>false</stopped> <duration>3417</duration> <mode>0</mode> <battery>100</battery> <hours>2202</hours> </status> <timer> <status>2</status> <next> <date>2020-11-21</date> <time>17:00:00</time> <unix>1605978000</unix> </next> </timer> <blades> <quality>73</quality> <hours>3</hours> <days>25</days> </blades> <wlan> <signal>-73</signal> </wlan> <health> <temperature>14</temperature> <humidity>47</humidity> </health> <clock> <date>2020-11-20</date> <time>22:39:33</time> <unix>1605911973</unix> </clock> <successful>true</successful> </robonect>